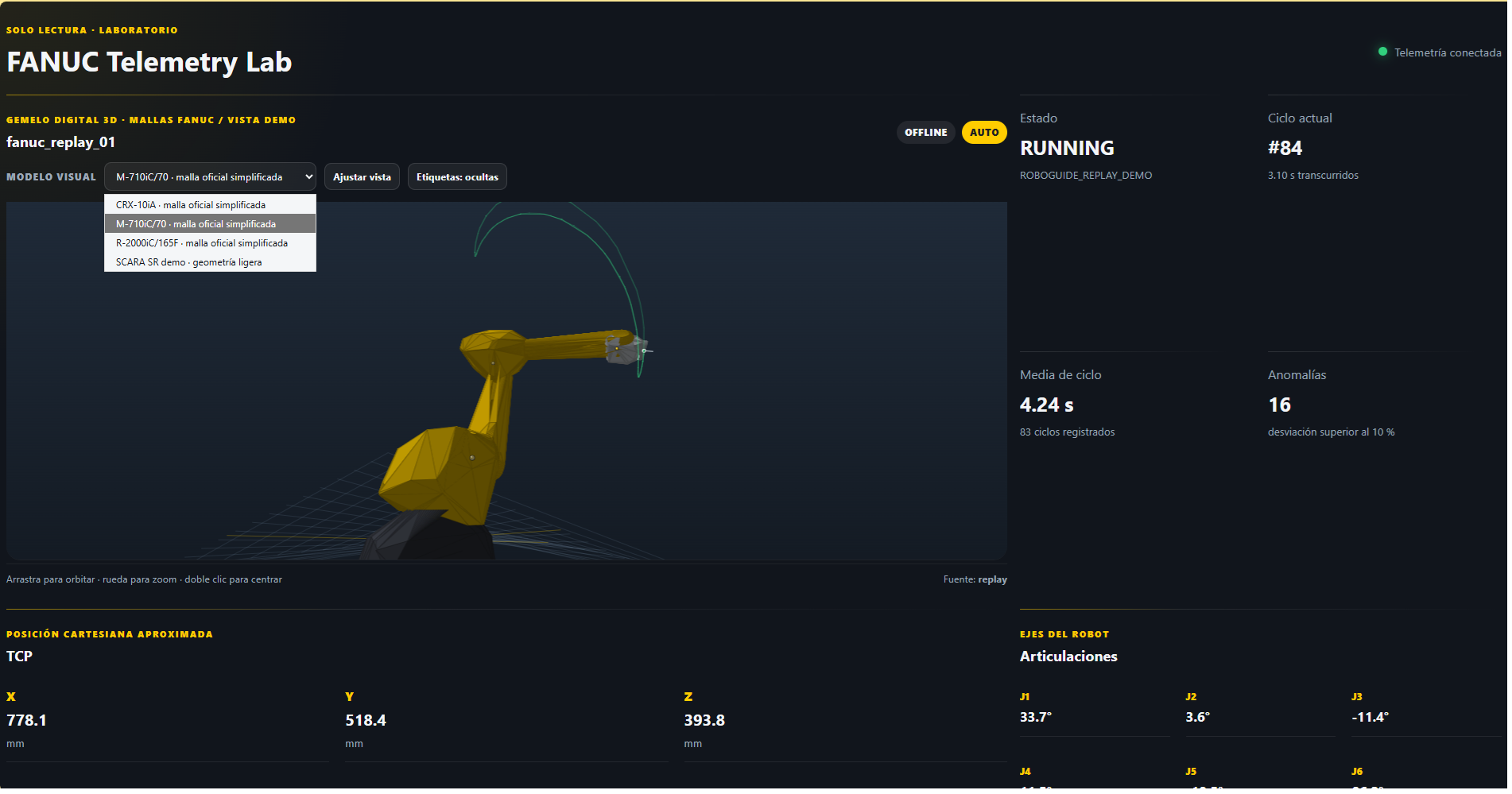
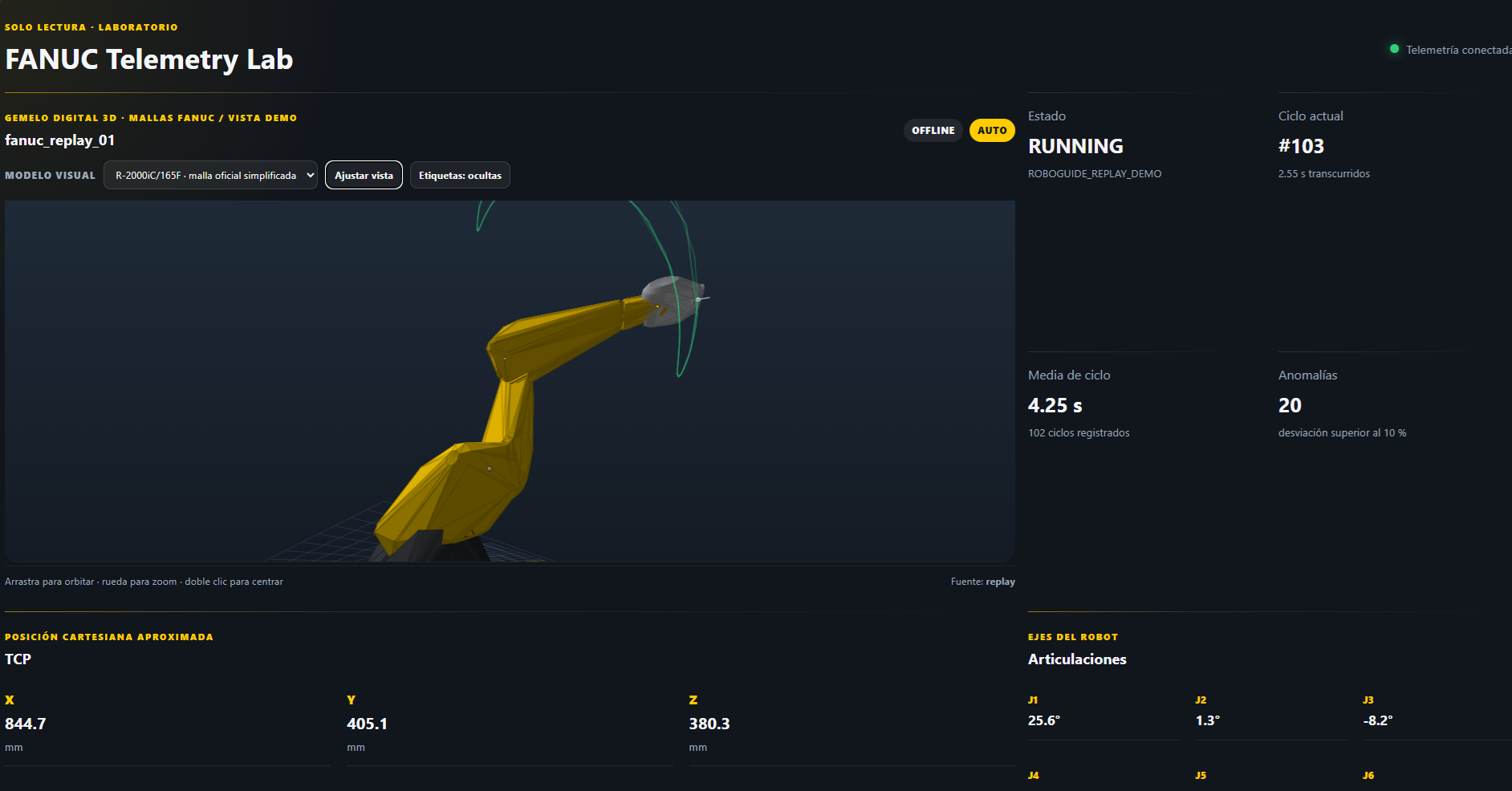
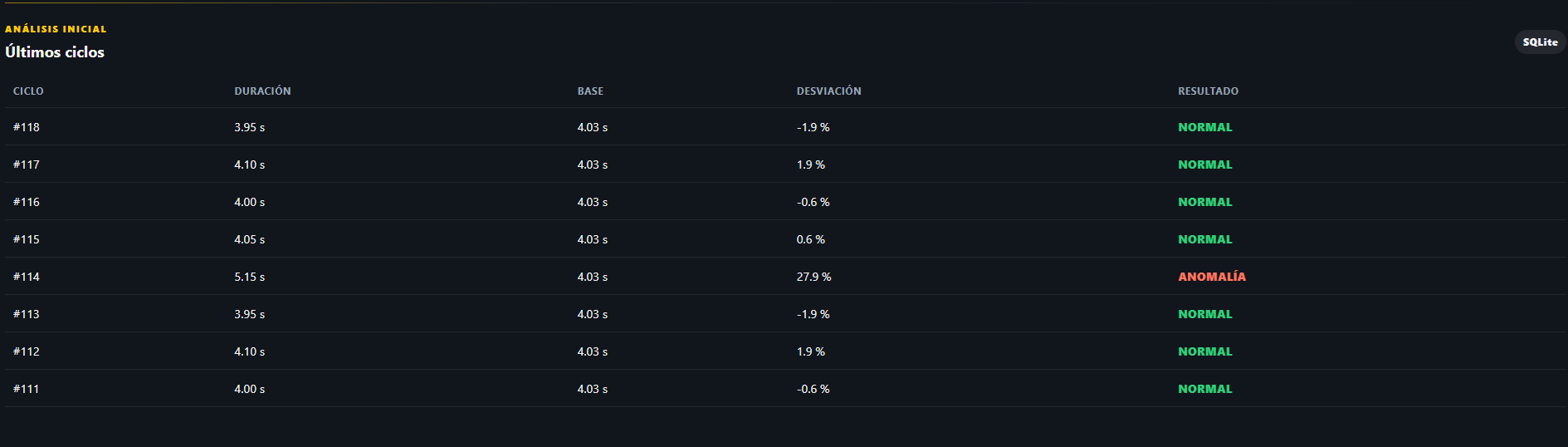
Interface grafica para el estudio y telemetria del correcto funcionamiento de un robot Fanuc
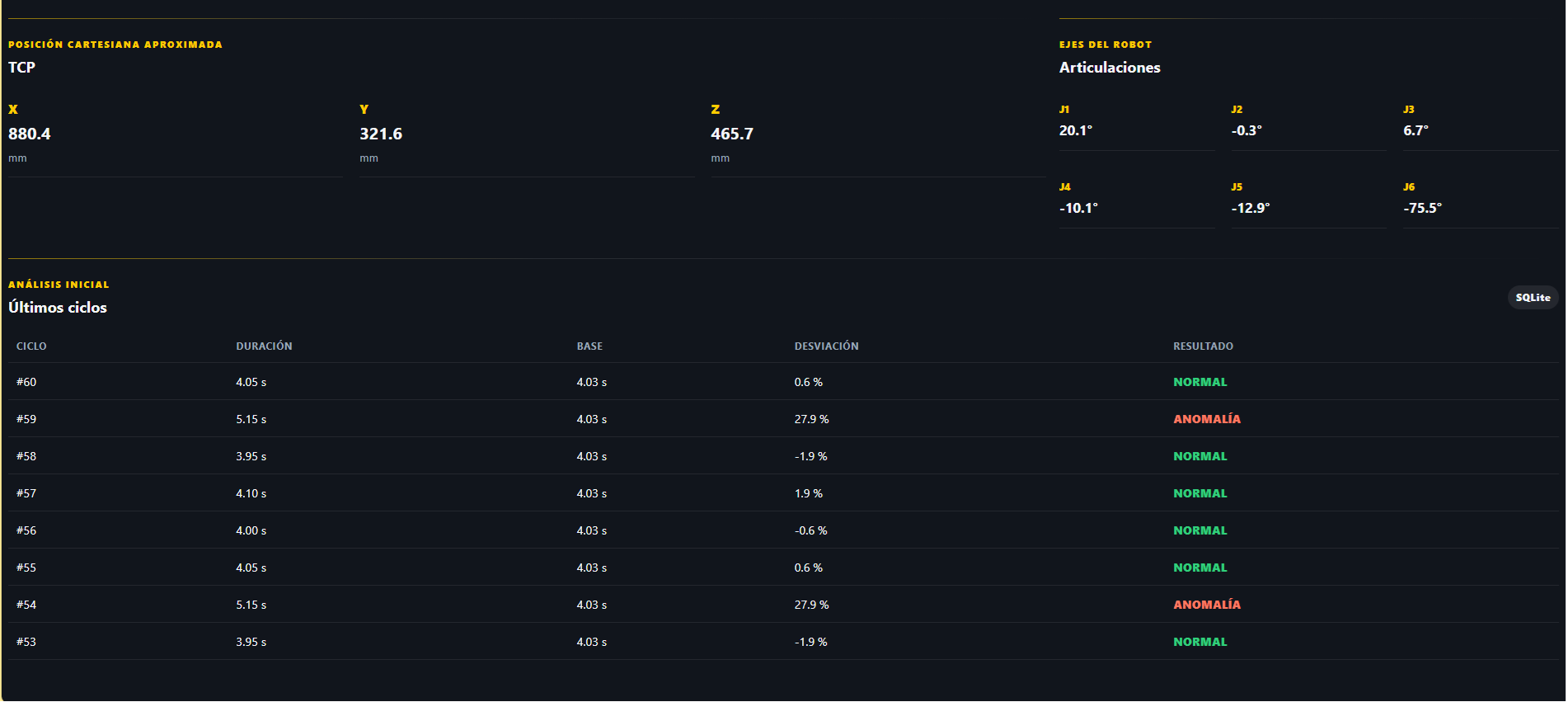
Mediante la captura de las posiciones de los ejes en tiempo real se realiza un analisis de cada ciclo para obtener desviaciones y estadisticas
Python
SQL Server
Flask
Capturas
¿Te interesa algo similar?
Hablemos